新技术帮助机器人实现3D视觉
最近,一组研究人员提出了一项新技术,可以帮助家庭机器人更好地感知和处理三维物体。
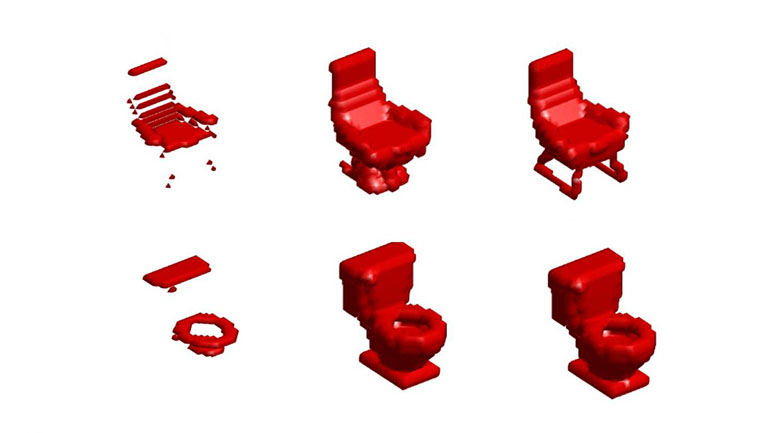
这项机器人感知算法于2017年7月在马萨诸塞州剑桥市的“机器人学:科学与系统会议”上亮相,它使机器人能够猜测物体是什么、它们的位置如何以及如果部分被隐藏了的话,它们是什么样子的,而无需从多个角度观察物体,就像人类观察物体一样。
杜克大学研究生本·伯奇菲尔解释说,这种能力对于那些在家庭环境中操作的机器人尤为重要,因为家庭中的物体和环境没有实验室或工厂场地那样井然有序。机器人需要能够从一个视角感知三维物体,以执行像清理桌子这样的家务操作。
首先,该算法通过数千个完整的家居物品三维扫描进行训练。然后,该算法会根据物体之间的相似程度将这些扫描分组为不同的类别。当面对一个新物体时,机器人可以在其数据库中筛选物体类别,而不是每个具体物体,以确定这个新物体可能是什么,或者它的隐藏部分是什么样子。
“假设机器人事先具有每个可能遇到的物体的详细三维模型是不切实际的,”伯奇菲尔在一份新闻稿中说道。
为了测试这个算法,研究人员提供了908个来自已有类别的新的三维示例,但观察角度都是俯视图,以确定算法能正确猜测多少个物体。研究人员发现,该算法有75%的准确率来猜测新物体的类型,而竞争技术只有大约50%的准确率。
与其他技术不同,这种新算法还可以识别旋转的物体。但当物体在某些角度上与其他物体形状相似时,它可能会犯错误。
“总的来说,我们在不到25%的时间里会犯错误,而最好的替代方案则有近一半的错误率,所以这是一个很大的改进,”伯奇菲尔说道。“但它还没有准备好进入你的家。你不希望它把枕头放进洗碗机里。”